
- Pesquisadores do MIT e do Woods Hole Oceanographic Institution criaram o Sonar-MASt3R, que fusiona dados de sonar e imagens para mapear ambientes subaquáticos em 3D em tempo real, mesmo em águas de baixa visibilidade.
- Em testes em tanque, o sistema mapeou formas usando sonar e identificou detalhes de objetos em centímetros, com câmeras ópticas fornecendo visão adicional quando possível.
- O método corrige a escala dos mapas gerados pelo MASt3R, oferecendo medidas precisas de distância e profundidade a partir das leituras de sonar.
- A apresentação ocorreu na conferência IEEE de Robótica e Automação (ICRA); a pesquisadora Amy Phung liderou o trabalho e o coautor é o pesquisador Richard Camilli.
- Aplicações para exploração científica, construção e manutenção subaquáticas e recuperação no fundo do mar são apontadas como possíveis usos, incluindo operações seguras em ambientes turvos.
A equipe de pesquisadores do MIT e da Woods Hole Oceanographic Institution (WHOI) apresentou uma técnica de mapeamento subaquático capaz de enxergar através de águas turvas. O método, batizado de Sonar-MASt3R, combina dados de sonar e imagens visuais para gerar mapas 3D em tempo real. O objetivo é permitir que veículos operados remotamente naveguem com maior segurança em visibilidade baixa.
Ao fundir imagens de câmaras ópticas com dados acústicos, o sistema determina a forma geral do ambiente pelo sonar e, em seguida, aproxima objetos com maior fidelidade por meio da visão óptica. A ideia é associar a percepção de um mamífero marinho a uma visão de curta distância, com funcionamento imediato.
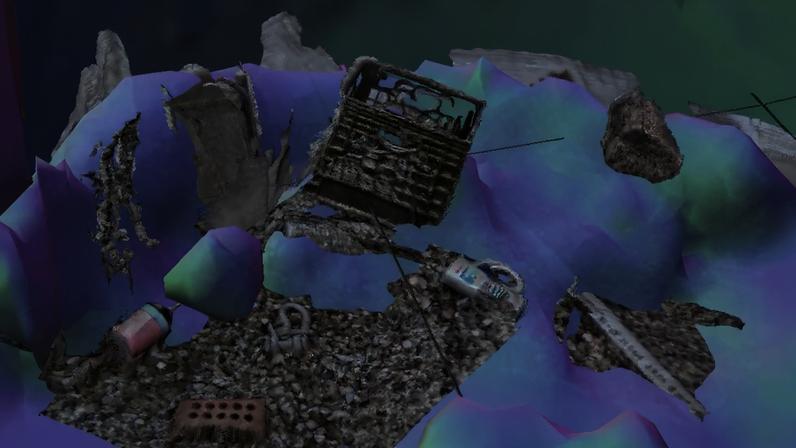
Os pesquisadores testaram a técnica em tanques com água, sedimento e objetos variados, controlando o nível de turbidez. Mesmo nas condições mais opaca, o Sonar-MASt3R mapeou o entorno e revelou detalhes em escala de centímetros.
Funcionamento
O método aprimora a técnica MASt3R, originalmente desenvolvida na França, que estima profundidade a partir de imagens. O sonar fornece medidas de escala absolutas, corrigindo a falta de referência do sistema apenas ótico. Assim, o mapa 3D torna-se preciso mesmo em água turva.
Em testes, sensores de sonar identificaram a geometria de objetos no tanque enquanto a câmera capta detalhes finos. O processo usa uma abordagem de “keyframes”: imagens novas com informação relevante são adicionadas ao mapa, enquanto frames redundantes são descartados para ganho de agilidade.
Resultados e aplicações
Em diferentes níveis de turbidez, o Sonar-MASt3R apresentou mapas mais precisos que abordagens anteriores e conseguiu visualizar objetos em detalhes centímetros. Em condições em que a câmera não via, o sonar forneceu uma base para que o veículo se aproximasse com segurança.
Os autores apontam aplicações em exploração científica, construção e manutenção subaquáticas, além de operações de recuperação em águas profundas. O método pode facilitar missões que hoje são inviáveis pela limitação de percepção.
Perspectivas e apoio
A equipe planeja testar o sistema em condições naturais, onde o ambiente subaquático é menos estável que em tanques. O objetivo é ampliar a cobertura de operações em locais de visibilidade reduzida.
O estudo contou com apoio parcial da NASA e da National Science Foundation. Os dois autores principais são a bolsista de MIT Amy Phung, líder do trabalho, e o pesquisador sênior Richard Camilli da WHOI.


Entre na conversa da comunidade